Specification Based Maneuvering Of Quadcopters
Development of a motion planning and task delegation framework that leverages quadrotor dynamics and temporal logic.
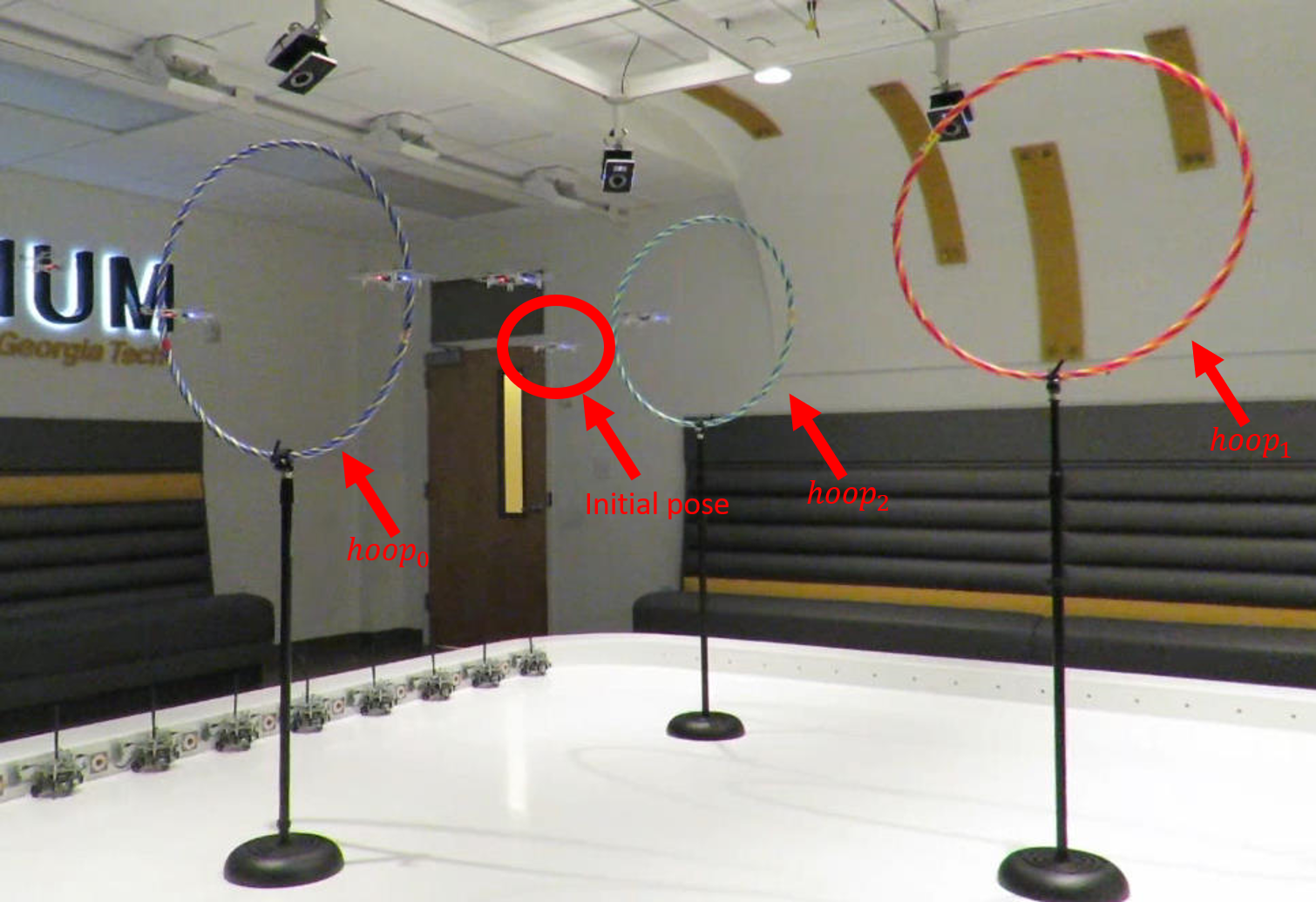
A composite image of a quadcopter satisfying a user provided specification (click on image for video
Project Summary
In this paper, we study the problem of navigating quadcopters through a sequence of hoops.
The specification may be given directly or indirectly via a linear temporal logic (LTL) formula. We approach this problem in three phases.
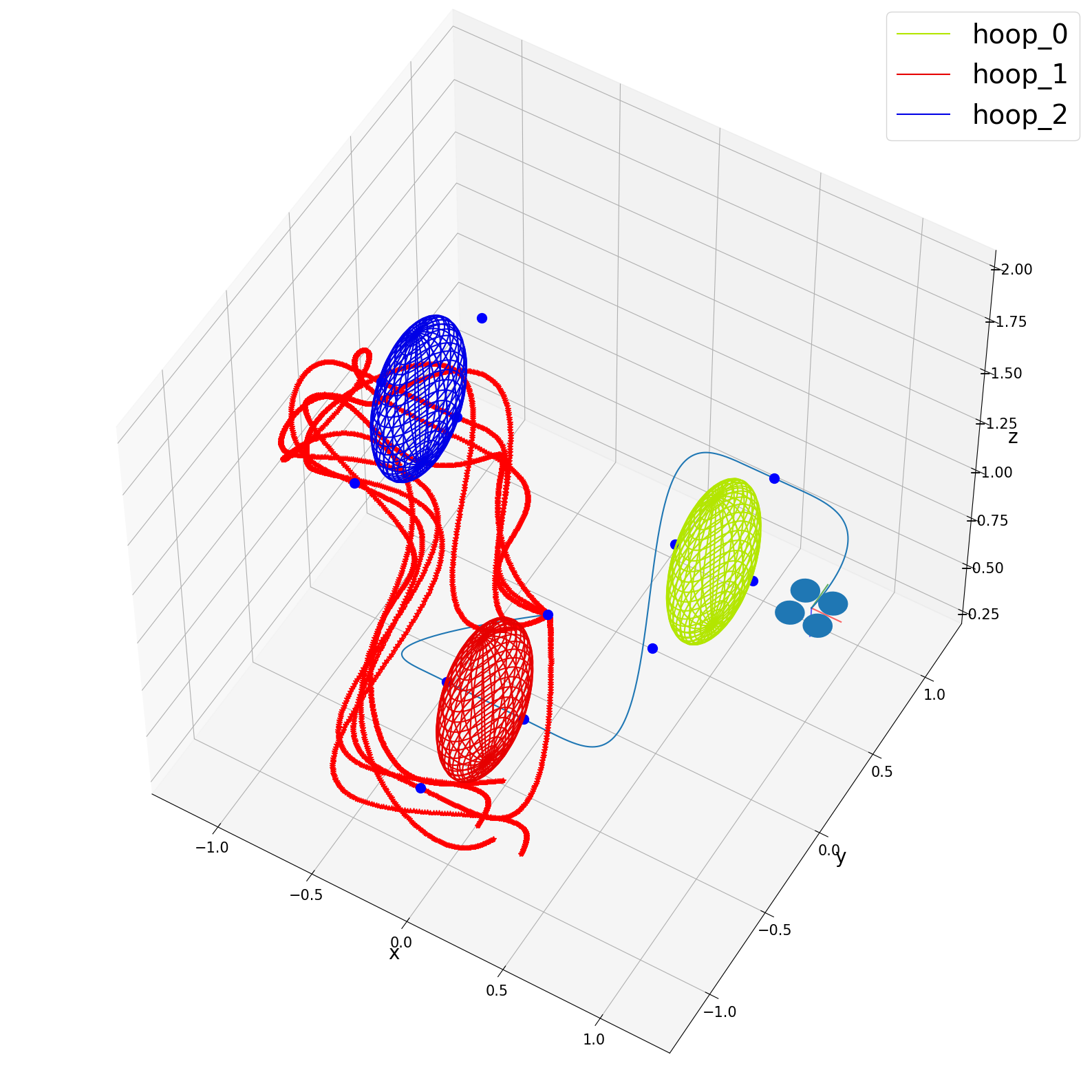
First, we introduce a planner that generates a path through a given sequence of hoops.
Second, we augment our planner to leverage a given specification in linear temporal logic (LTL) and generate a sequence that satisfies this specification.
Third, we implement cross-entropy optimization on this planner to enhance trajectory performance where quadcopter trajectories are modified within the solution space to optimize over a cost function.
We implement this planner as a novel interaction modality between users and quadcopters on the Robotarium. Simulation and experimental results are provided.
